ESP 物联网开发入门2:手指机器人
既然上一篇咱们已经让 ESP8266 的自带灯亮起来了,那说明开发环境已经通了。今天咱们玩点硬核的:做一个“物理外挂”,远程帮咱按电脑开机键。
ESP 物联网开发入门2:手指机器人
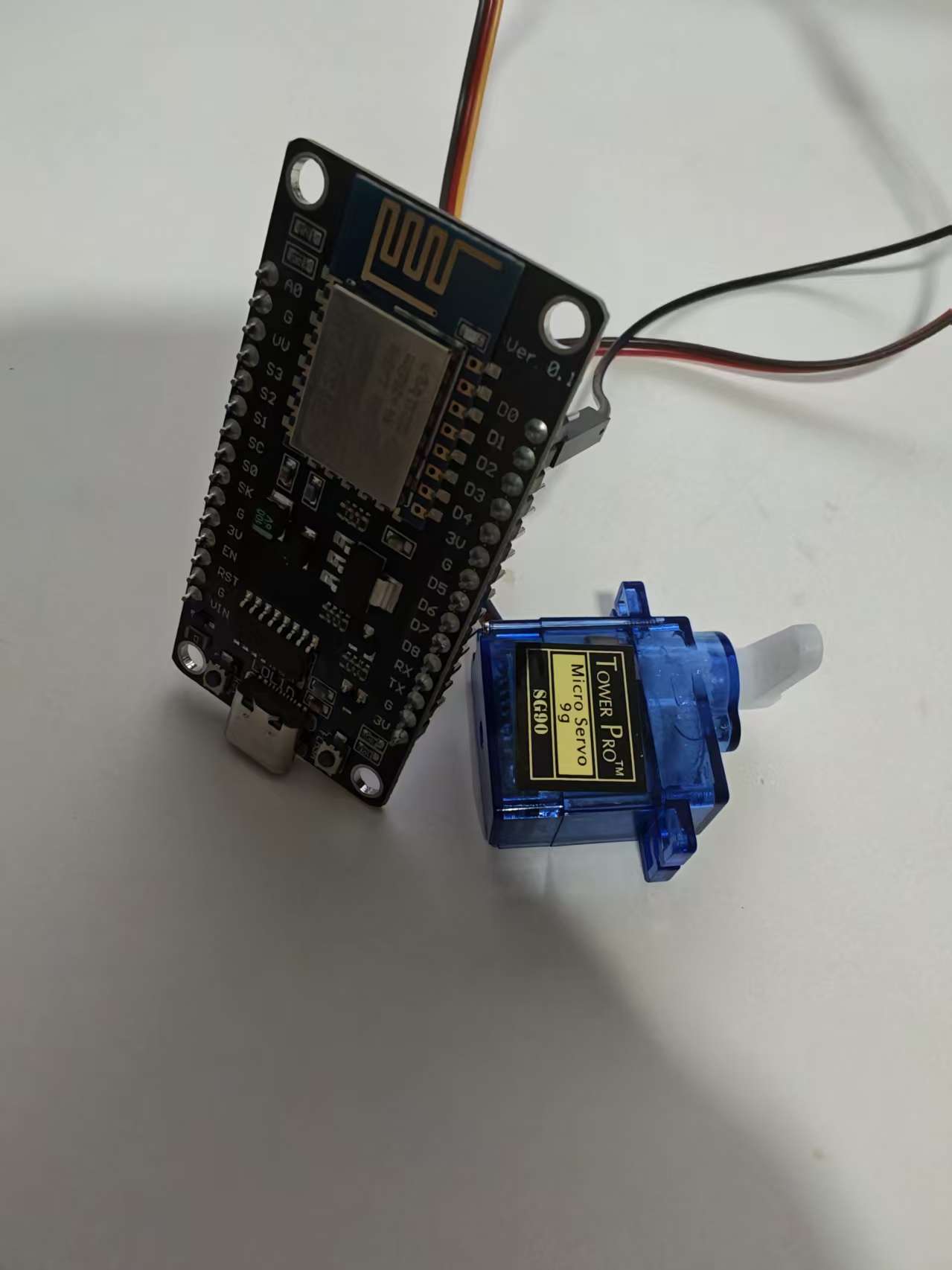
这次的主角依然是性价比之王 ESP8266(NodeMCU),配合一个 2 块 9 包邮的舵机(Servo)。
1. 硬件“全家桶”
除了之前的 NodeMCU,你还需要准备:
- SG90 舵机: 这种蓝色的小舵机就行,力气够大,正好能按动电脑键。
- 杜邦线: 3 根(公对母)。
- 双面胶/蓝丁胶: 用来把舵机粘在电脑机箱上。
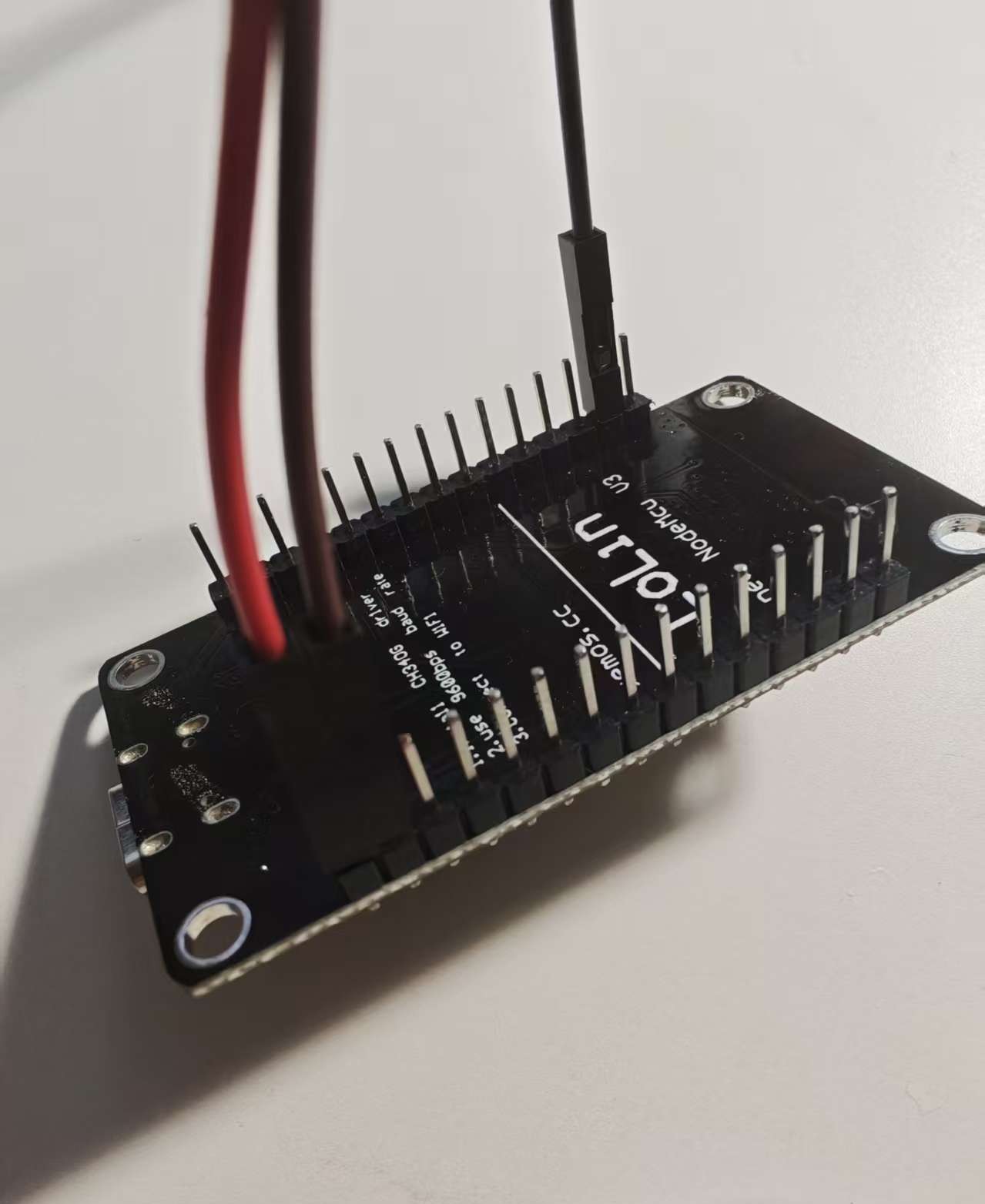
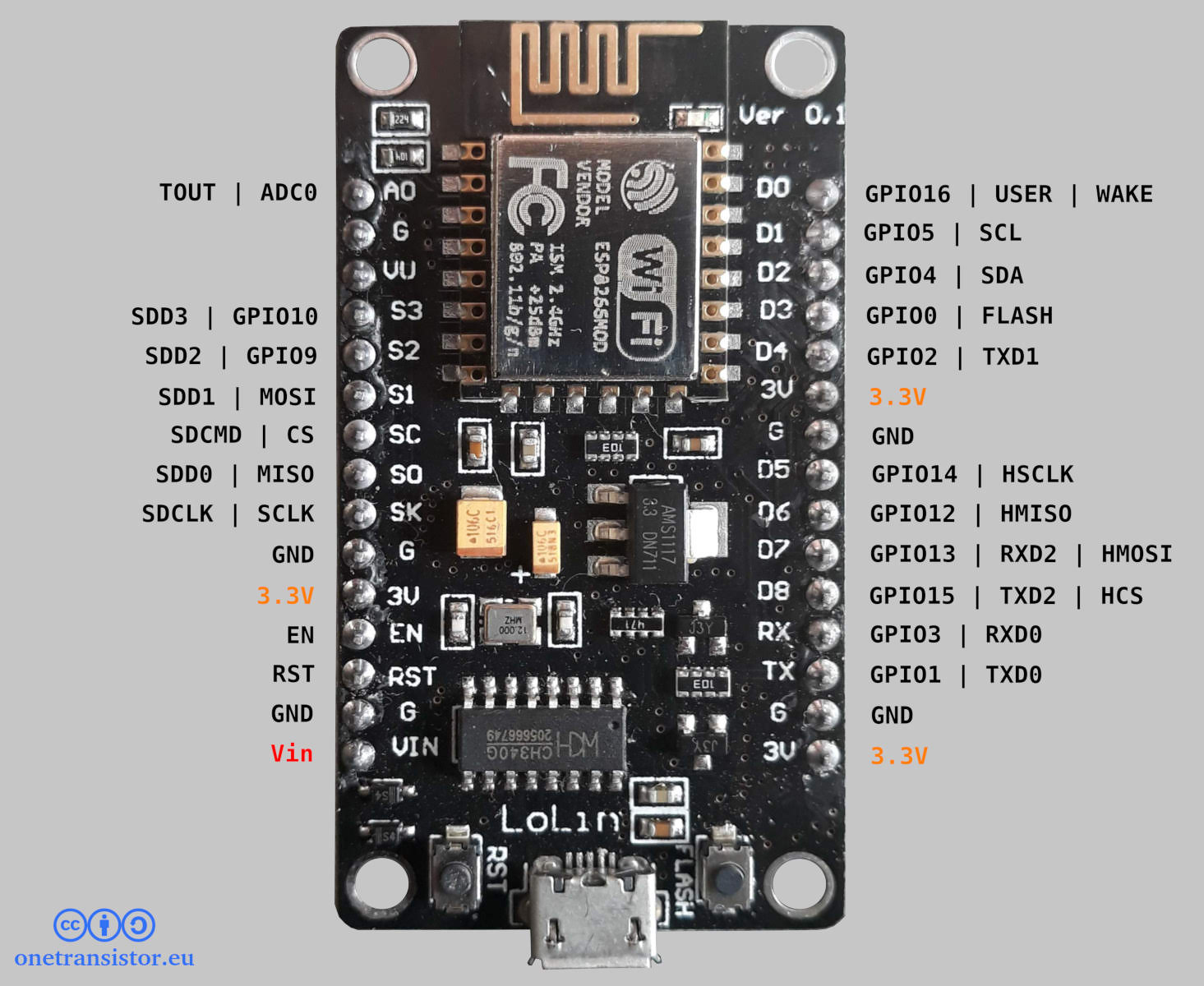
2. 接线图:别接错,会没力气
舵机有三根线,颜色通常是固定的:
棕色(地线): 接 ESP8266 的 G”>GND。
红色(电源): 接 ESP8266 的 VIN 引脚(注意:VIN 输出的是 USB 的 5V 电压,接 3.3V 舵机可能转不动。byd我的vin针脚虚焊没电,不过实测3.3V带的动)。
黄色(信号): 接 ESP8266 的 D1(对应代码里的 GPIO 5)。
连接如图:

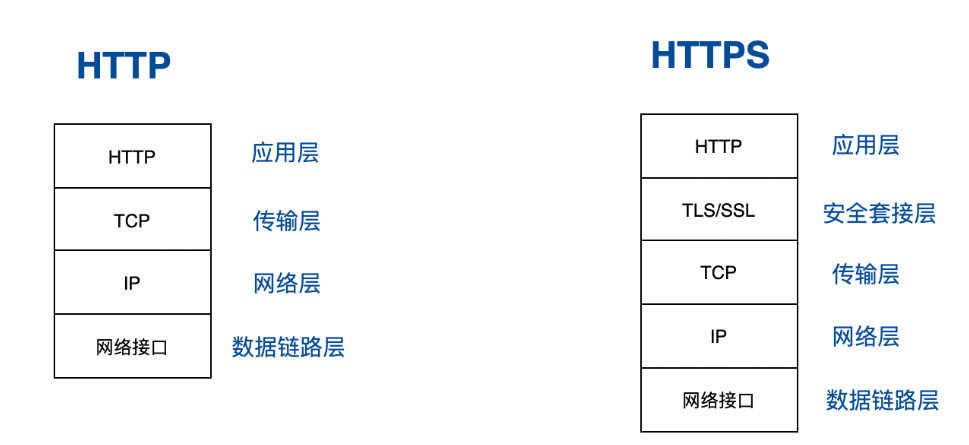
3. 准备“遥控器”:点灯科技(Blinker)
写代码前,先去手机应用商店下个 Blinker(点灯科技) App。
- 进入 App,点击添加设备 -> 独立设备 -> 网络接入。
- 复制那个 Secret Key(密钥),待会儿要填进代码里。
- 在设备界面加一个“按钮”组件,把它的组件键名修改为
btn-abc(你自己起个名,代码里要对得上)。
4. 搞定代码(ESP8266 版)
把下面的代码粘贴进 Arduino IDE。记得把 密钥、WiFi名 和 密码 换成你自己的。
#define BLINKER_WIFI
#include <Blinker.h>
#include <Servo.h>
// 1. 修改为你自己的信息
char auth[] = "你的Blinker Secret Key";
char ssid[] = "你的WiFi名字";
char pswd[] = "你的WiFi密码";
Servo myServo;
BlinkerButton Button1("btn-boot"); // 这里的名字要和 App 里的“组件键名”对上
// 2. 舵机动作函数:转下去 -> 等半秒 -> 回位
void servo_callback(const String & state) {
Serial.println("收到指令,准备开机!");
myServo.write(60); // “手指”按下的角度(根据实际情况微调这个数字)
Blinker.delay(500); // 停顿 0.5 秒,模拟真人按压
myServo.write(0); // “手指”收回原位
}
void setup() {
Serial.begin(115200);
// 信号线接 D1 (GPIO 5)
myServo.attach(5);
myServo.write(0); // 初始状态:手指收起
// 初始化 Blinker
Blinker.begin(auth, ssid, pswd);
// 把按钮和函数绑定
Button1.attach(servo_callback);
}
void loop() {
Blinker.run(); // 保持在线
}5. 灵魂安装:大力胶工程
代码上传成功后,你会发现只要在手机上一按,舵机就转一下。接下来的工作就属于“土木工程”了:
- 找个合适的位置,用双面胶把舵机粘在机箱上。
- 调整舵机摇臂的角度,确保它“转下去”的时候刚好能压住开机键,“转回来”的时候不挡着按键弹起。
- 电源: 随便找个手机充电头给 ESP8266 供电就行。
6. 避坑小贴士
- 舵机抖动: 如果舵机一直在那“嘶嘶”响或者乱抖,通常是电流不够。换个好点的 5V/2A 充电头。
- 连不上网: ESP8266 只支持 2.4G WiFi。如果你家路由器的 2.4G 和 5G 合一了,建议分开,否则它可能半天连不上。
- 掉线: Blinker 免费版偶尔会有延迟,这是正常的。或者说练的是电脑的USB接口,电脑关机也自然就不供电了(除非电脑支持关机usb供电)。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 ZCP妙妙屋!
相关推荐

2026-03-05
ESP 物联网开发入门3:WOL唤醒
ESP 物联网开发入门3:WOL唤醒在上一篇里,我们给电脑装了个“物理手指”来按开关。虽然稳,但总觉得不够科技感。如果你的主板支持,其实完全可以用一种更“黑客”的方式——**Wake on LAN (WOL)**。 简单来说,这就是给网卡发一个“暗号”,让它自己去叫醒整台电脑。 一、 什么是“魔术包”?电脑关机后,只要电源没拔,网卡其实还在偷偷“值班”。它在等一个特定的数据包,也就是魔术包(Magic Packet)。 魔术包的结构很奇葩:6个 0xFF 后面跟着 16遍你的网卡 MAC 地址。网卡一旦在局域网里抓到这个组合,就会像打了鸡血一样瞬间触发开机。 二、 动手前的“三大关”别急着烧录代码,WOL 最大的坑通常在配置上: BIOS 允许:开机狂按 F10(取决于电脑,我的是F10) 进入 BIOS,把 Wake on LAN 或者 Power On by PCI-E 这种选项改成 Enabled。 网卡允许:在 Windows 设备管理器里找到你的网卡,属性里的“电源管理”必须勾选“允许此设备唤醒计算机”。 必须插网线:绝大多数主板的内置 WiFi 关机后就断电了。所以...
2026-03-04
ESP 物联网开发入门1:从零点亮你的第一颗灯
ESP 物联网开发入门:从零点亮你的第一颗灯很多小伙伴想搞“远程开机”、“智能家居”,对着网上的教程看半天,结果被各种名词劝退。其实物联网没那么玄乎。今天咱不整那些虚头巴脑的,直接用大白话带你把单片机和 ESP32 摸透,顺便帮大家避几个我踩过的坑。 1. 到底什么是单片机?你可以把它理解为一个“被阉割过的电脑”。 电脑有 CPU、内存、硬盘,单片机也有,只不过为了省电、便宜、体积小,性能缩减到了极致。 电脑: 运行 Windows,能打游戏、剪视频,但很贵、费电。 单片机: 没有桌面,只运行你写进去的一段代码。它能控制电饭煲什么时候跳闸,能让遥控器发射红外线。 一句话总结: 它就是个只会干体力活、极其听话的“微型大脑”。 2. 为什么大家都推荐 ESP? 单片机有很多种,比如老掉牙的 51,或者满大街的 STM32。但对于玩物联网(IoT)的人来说,ESP 系列才是真香。 ESP8266: 曾经的老大哥,便宜到只要几块钱,自带 WiFi。如果你预算极低且不需要太多花里胡哨的功能,可以用它。 ESP32: 现在的主流。多了蓝牙、双核 CPU(跑得快)、更多的引脚。建议新...